
Top 13 hvnet: hybrid voxel network for lidar based 3d object detection in 2022
Below are the best information and knowledge on the subject hvnet: hybrid voxel network for lidar based 3d object detection compiled and compiled by our own team evbn:
Mục Lục
1. GitHub – AndyYuan96/HVNet
Author: arxiv.org
Date Submitted: 10/24/2020 10:36 AM
Average star voting: 4 ⭐ ( 69703 reviews)
Summary: Contribute to AndyYuan96/HVNet development by creating an account on GitHub.
Match with the search results: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving….. read more
2. HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection
Author: openaccess.thecvf.com
Date Submitted: 07/06/2021 05:10 PM
Average star voting: 4 ⭐ ( 61648 reviews)
Summary: Papertalk is an open-source platform where scientists share video presentations about their newest scientific results – and watch, like + discuss them
Match with the search results: Abstract. We present Hybrid Voxel Network (HVNet), a novel one- stage unified network for point cloud based 3D object detec- tion for autonomous driving….. read more

3. Homepage of Shuangjie Xu
Author: ieeexplore.ieee.org
Date Submitted: 02/15/2021 04:40 AM
Average star voting: 4 ⭐ ( 26861 reviews)
Summary: Deep Learning Engineer
Match with the search results: Abstract. We present Hybrid Voxel Network (HVNet), a novel one- stage unified network for point cloud based 3D object detec- tion for autonomous driving….. read more
![]()
4. HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection
Author: github.com
Date Submitted: 01/19/2021 10:50 PM
Average star voting: 3 ⭐ ( 41503 reviews)
Summary: Authors: Maosheng Ye, Shuangjie Xu, Tongyi Cao Description: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving….
Match with the search results: HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection. This is an unofficial implementation of paper HVNet. And the code is based on PCDet and ……. read more

5. Hybrid Attention-Based 3D Object Detection with Differential Point Clouds
Author: www.researchgate.net
Date Submitted: 10/25/2020 02:46 PM
Average star voting: 5 ⭐ ( 70797 reviews)
Summary: Object detection based on point clouds has been widely used for autonomous driving, although how to improve its detection accuracy remains a significant challenge. Foreground points are more critical for 3D object detection than background points; however, most current detection frameworks cannot effectively preserve foreground points. Therefore, this work proposes a hybrid attention-based 3D object detection method with differential point clouds, which we name HA-RCNN. The method differentiates the foreground points from the background ones to preserve the critical information of foreground points. Extensive experiments conducted on the KITTI dataset show that the model outperforms the state-of-the-art methods, especially in recognizing large objects such as cars and cyclists.
Match with the search results: … HVNet [19] offers a hybrid voxel network that refines the projected and aggregated feature maps from multiple scales to improve detection performance. CIA- ……. read more

6. A Survey on Deep-Learning-Based LiDAR 3D Object Detection for Autonomous Driving
Author: www.researchgate.net
Date Submitted: 12/27/2020 05:15 AM
Average star voting: 5 ⭐ ( 87370 reviews)
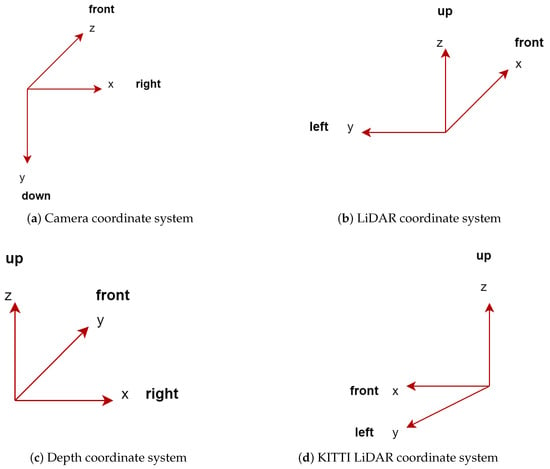
Summary: LiDAR is a commonly used sensor for autonomous driving to make accurate, robust, and fast decision-making when driving. The sensor is used in the perception system, especially object detection, to understand the driving environment. Although 2D object detection has succeeded during the deep-learning era, the lack of depth information limits understanding of the driving environment and object location. Three-dimensional sensors, such as LiDAR, give 3D information about the surrounding environment, which is essential for a 3D perception system. Despite the attention of the computer vision community to 3D object detection due to multiple applications in robotics and autonomous driving, there are challenges, such as scale change, sparsity, uneven distribution of LiDAR data, and occlusions. Different representations of LiDAR data and methods to minimize the effect of the sparsity of LiDAR data have been proposed. This survey presents the LiDAR-based 3D object detection and feature-extraction techniques for LiDAR data. The 3D coordinate systems differ in camera and LiDAR-based datasets and methods. Therefore, the commonly used 3D coordinate systems are summarized. Then, state-of-the-art LiDAR-based 3D object-detection methods are reviewed with a selected comparison among methods.
Match with the search results: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving….. read more
7. Refined Voting and Scene Feature Fusion for 3D Object Detection in Point Clouds
Author: www.computer.org
Date Submitted: 08/20/2020 01:40 PM
Average star voting: 4 ⭐ ( 34508 reviews)
Summary: An essential task for 3D visual world understanding is 3D object detection in lidar point clouds. To predict directly bounding box parameters from point clouds, existing voting-based methods use Hough voting to obtain the centroid of each object. However, it may be difficult for the inaccurately voted centers to regress boxes accurately, leading to the generation of redundant bounding boxes. For objects in indoor scenes, there are several co-occurrence patterns for objects in indoor scenes. Concurrently, semantic relations between object layouts and scenes can be used as prior context to guide object detection. We propose a simple, yet effective network, RSFF-Net, which adds refined voting and scene feature fusion for indoor 3D object detection. The RSFF-Net consists of three modules: geometric function, refined voting, and scene constraint. First, a geometric function module is used to capture the geometric features of the nearest object of the voted points. Then, the coarse votes are revoted by a refined voting module, which is based on the fused feature between the coarse votes and geometric features. Finally, a scene constraint module is used to add the association information between candidate objects and scenes. RSFF-Net achieves competitive results on indoor 3D object detection benchmarks: ScanNet V2 and SUN RGB-D.
Match with the search results: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving….. read more

8. 3D Object Detection with Differential Point Clouds
Author: papertalk.org
Date Submitted: 11/12/2020 09:19 PM
Average star voting: 5 ⭐ ( 93022 reviews)
Summary: Encyclopedia is a user-generated content hub aiming to provide a comprehensive record for scientific developments. All content free to post, read, share and reuse.
Match with the search results: Papertalk is an open-source platform where scientists share video presentations about their newest scientific results – and watch, like + discuss them….. read more
![]()
9. PV-RCNN++: Point-Voxel Feature Set Abstraction With Local Vector Representation for 3D Object Detection | SpringerLink
Author: shuangjiexu.github.io
Date Submitted: 11/01/2020 12:09 AM
Average star voting: 3 ⭐ ( 31308 reviews)
Summary: 3D object detection is receiving increasing attention from both industry and academia thanks to its wide applications in various fields. In this paper, we
Match with the search results: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving. Recent studies show ……. read more

10. LiDAR and Deep Learning-Based Standing Tree Detection for Firebreaks Applications
Author: researchsurvey.daiict.ac.in
Date Submitted: 01/01/2022 02:54 AM
Average star voting: 3 ⭐ ( 38006 reviews)
Summary:
Match with the search results: HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection 2/5 (1). please provide your confidence rating to review this paper. Sample rating item ……. read more

11. PillarNet: Real-Time and High-Performance Pillar-Based 3D Object Detection | Computer Vision – ECCV 2022
Author: crossminds.ai
Date Submitted: 05/16/2021 01:24 PM
Average star voting: 4 ⭐ ( 21819 reviews)
Summary:
Match with the search results: We present Hybrid Voxel Network (HVNet), a novel one-stage unified network for point cloud based 3D object detection for autonomous driving….. read more

12. CVPR 2020: The Top Object Detection Papers
Author: www.mdpi.com
Date Submitted: 08/10/2020 09:40 PM
Average star voting: 3 ⭐ ( 46978 reviews)
Summary: The recently-concluded CVPR 2020 had quite a large number of contributions in pushing object detection forward. In this piece, we’ll look at a couple of the especially impressive papers. This paper…
Match with the search results: Abstract. We present Hybrid Voxel Network (HVNet), a novel one- stage unified network for point cloud based 3D object detec- tion for autonomous driving….. read more

13. DICE LAB
Author: www.mdpi.com
Date Submitted: 07/28/2021 01:15 PM
Average star voting: 4 ⭐ ( 30729 reviews)
Summary:
Match with the search results: Abstract. We present Hybrid Voxel Network (HVNet), a novel one- stage unified network for point cloud based 3D object detec- tion for autonomous driving….. read more















![Toni Kroos là ai? [ sự thật về tiểu sử đầy đủ Toni Kroos ]](https://evbn.org/wp-content/uploads/New-Project-6635-1671934592.jpg)


