
Hướng dẫn tự làm robot hút bụi Panda – Cách Dùng

Xin chào, dự án này dành riêng cho con trai tôi, người sẽ sinh vào tháng tới, vì vậy tôi đặt tên nó theo biệt danh “Panda” của con trai tôi. Đây là phiên bản cải tiến của robot hút bụi với các tính năng mạnh mẽ làm sạch như hút không khí, quét bằng bàn chải. Nó chọn ngẫu nhiên hướng nó để di chuyển, phát hiện chướng ngại vật. Vì đây là một dự án khá lớn để thực hiện, phải mất gần cả tháng để phác thảo cơ khí, ID, điện và phần mềm, và những thứ bên trong này sẽ cho bạn thấy khái niệm về cách tạo ra một robot như thế này!
Bạn đang đọc: Hướng dẫn tự làm robot hút bụi Panda – Cách Dùng
Giới thiệu và phương pháp hoạt động giải trí :
Quét rác tại nơi thao tác
Quét tại nơi làm việc2 :
quét dọn tại nơi thao tác 3
Panda trong hành vi
Bước 1: Giới thiệu phiên bản cũ

Robot trước đây của tôi đã được triển khai cách đây hai năm, do size quá nhỏ, tôi phải liên kết nó với nguồn điện như PC với dây cáp, và điều này gây phiền phức trong khi dọn bàn, thế cho nên tôi quyết định hành động sản xuất một robot size trung bình để thay thế sửa chữa con cũ của tôi để dọn bàn và sàn nhà .
Bước 2: Vật liệu
Những cái bạn cần để hoàn thành xong robot là .
Cơ khí:
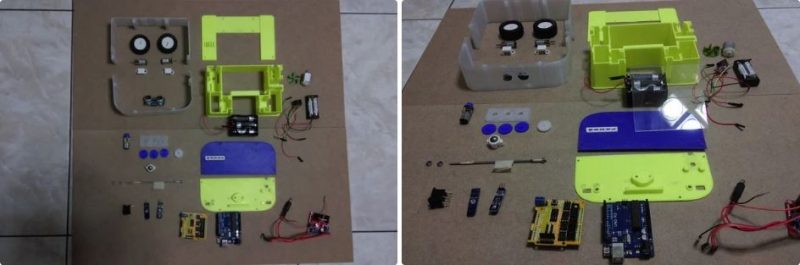
1 ) Tất cả những bộ phận được in 3D gồm có : Nắp trên và dưới, nắp ở giữa, 2 nắp pin, nắp hộp số và ngăng bụi ,
2 ) 2 động cơ bánh răng ( 135RPM ) cho những bánh xe .
3 ) 1 động cơ bánh răng ( 1000RPM ) cho con lăn và máy quét .
4 ) Động cơ 1 DC 3V dùng để hút bụi và cánh quạt .
5 ) 1 hộp pin với 6 khe cắm cho AA .
6 ) 1 hộp pin với 2 khe cắm cho AAA. ( Hút bụi )
7 ) 1 trục chính sắt kẽm kim loại và 1 ổ trục vừa khít với đầu trục chính. ( Trục lăn )
8 ) 3 bánh răng – cùng size cho bộ quét )
9 ) 1 bánh răng có răng ở bên ( để chuyển dời máy quét và con lăn )
10 ) Hai bánh xe đồ chơi .
11 ) 1 bảng nhựa để đặt qua ngăng chứa bụi .
12 ) 1 huy hiệu tên .
13 ) Bóng mang sắt kẽm kim loại cho bánh trước .
14 ) 1 chổi quét .
15 ) 1 con lăn in .
16 ) 30 đai ốc và 30 ốc vít ,
17 ) 1 bánh cho động cơ của con lăn .
Linh kiện điện:
1 ) 1 board UNO .
2 ) Lá chắn lan rộng ra cho UNO .
3 ) 1 L298 để kích hoạt bánh xe .
4 ) 1 cảm ứng phát hiện siêu âm .
5 ) 2 cảm ứng hồng ngoại để phát hiện vách tường .
6 ) 1 rơle 3V ( để hút bụi )
7 ) dây cáp .
8 ) 1 công tắc nguồn
9 ) 6 pin AA
10 ) 2 pin AAA .
Bước 3: Lập kế hoạch
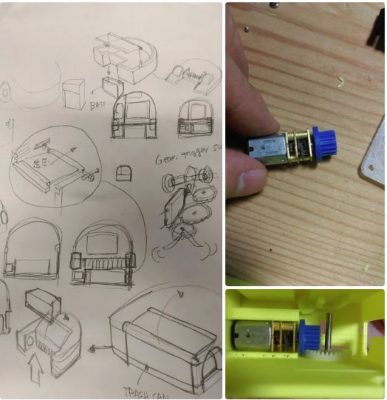
Để củng cố lực hút từ robot hút bụi phiên bản trước của tôi, tôi đã thêm một con lăn với bàn chải và máy quét để nhân lực làm sạch và nó biến robot thành một phiên bản hoàn hảo của robot làm bằng tay. Để đạt được con lăn và máy quét, tôi đã nỗ lực nghĩ cách không sử dụng động cơ để lái chúng ( vì nó gây tiêu tốn lãng phí nguồn năng lượng pin ) mà sử dụng bánh răng để kích hoạt cả con lăn và máy quét. Video cho thấy tác dụng và ý tưởng sáng tạo về điều đó, 3 bánh răng cho máy quét được liên kết với con lăn với 1 động cơ và nó hoạt động giải trí tốt. Phần này là phần khó nhất của dự án Bất Động Sản này .
Bước 4: Đo lường và đặt
Như thường lệ, bạn cần triển khai toàn bộ những phép đo của tổng thể những bộ phậnmà bạn có trong mẫu sản phẩm in 3D, gồm có tổng thể những bảng điện tử, động cơ, thiết bị, ,, ,, v.v., đây là việc làm tốn thời hạn, nhưng đáng giá khi bạn nhìn thấy hiệu quả của điều đó
Tiếp theo, phần nhập nhiều nhất là vị trí, vì tôi đã tạo kích cỡ của robot thành size 17 cm x 17 cm, tôi cần phải ép toàn bộ những bộ phậnđo được trong khoảng trống đó. VUI LÒNG cẩn trọng với những dây cáp đó, bạn cũng cần xem xét toàn bộ những điều đó, ví dụ, cáp của PCO của UNO có phích cắm này khá dài, nếu bạn không xem xét, có lẽ rằng bạn sẽ không hoàn toàn có thể cắm cáp khi vặn chặt bo mạch vì nó sẽ chạm vào L298 ngay bên cạnh UNO. Vì vậy hãy xem xét tổng thể những điều đó trong khi bạn lắp ráp .
Bước 5: Khung ngoài
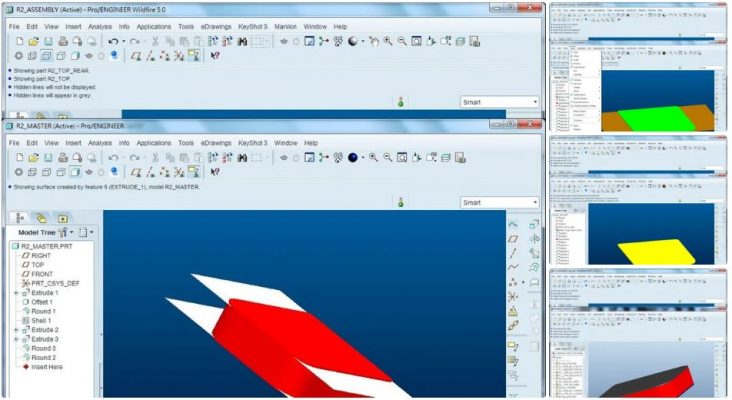
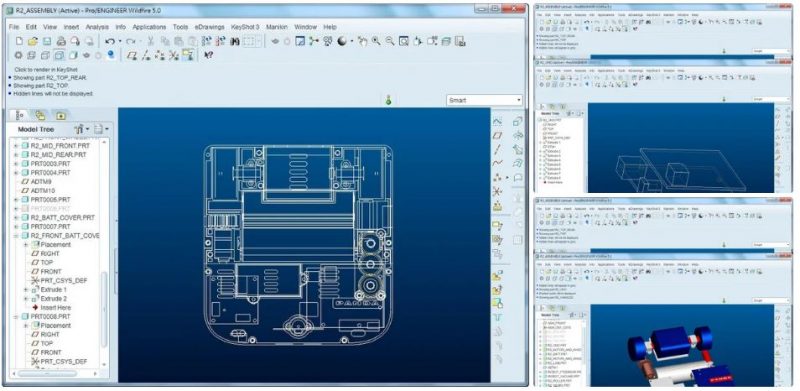
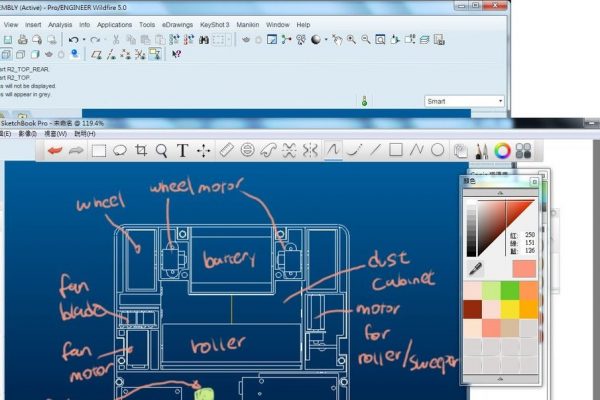
Về quy mô hóa, sử dụng bất kể ứng dụng quy mô nào tương thích với bạn, trong trường hợp của tôi, tôi sử dụng PRO_E cho quy mô hóa, Bạn hoàn toàn có thể bỏ lỡ phần này nếu bạn đã giỏi quy mô hóa hoặc sử dụng PRO_E. Bắt đầu với một khối có ít tính năng ( chi tiết cụ thể ) nhất hoàn toàn có thể, trong thuật ngữ của ID, đây được gọi là quy mô chính ID. Tất cả những nơi sẽ đề cập đến điều này trong tương lai. Vì vậy, khi bạn cần kiểm soát và điều chỉnh toàn bộ những kích cỡ của vỏ, toàn bộ những gì bạn cần làm là kiểm soát và điều chỉnh quy mô chính này và tạo lại toàn bộ những bộ phận của vỏ, hơn là bạn sẽ có được kích cỡ mới cho toàn bộ những vỏ .
Vì vậy, tôi đã lên kế hoạch để có khung ngoài số 1. Khung ở giữa và khung ở dưới cùng, trong hình có khối màu đỏ hiển thị quy mô chính, tôi đã tạo hai mặt phẳng để chỉ ra ranh giới cho khung ở trên, giữa và dưới. Tiếp theo, bạn cần tạo 3 tệp có tên TOP.prt, MID.prt và BTM.prt. Trong pic khối màu xanh lá cây ( TOP.prt ), tôi sao chép mặt phẳng của quy mô tổng thể và toàn diện hình học và củng cố nó, cũng sao chép mặt phẳng để cắt ra lớp vỏ trên cùng. Kết quả là như khối VÀNG hiển thị. Các bước hình học sao chép giống nhau vận dụng cho MID và BTM.prt. Một khi nó được thực thi, nó sẽ trông giống như pic4. ( Lắp ráp cho TOP, MID và BTM )
Tiếp theo, bọc vỏ MID để làm cho nó dày 2 mm. Vì vậy, thay vì một khối, bạn cần phải tạo vỏ cho nó để cung ứng cho nó khoảng trống trống để ép toàn bộ những bộ phận vào trong .
Bước 6: Những điều cần xem xét khi lập mô hình (1)
Máy in 3D của tôi chỉ in tối da 20 cm x 15 cm, thế cho nên chắc như đinh quy mô của tôi sẽ không hề vừa với ( 17 cmx17cm ), Nếu bản in của máy in 3D của bạn đủ lớn, thì bạn hoàn toàn có thể bỏ lỡ phần này. Vì vậy, những gì tôi sẽ làm là, cắt khung ở TOP, MID, BTM thành 50% tương ứng. Vì vậy, bạn sẽ có được tổng số 6 phần với nhau. Lợi ích cho điều đó là bạn hoàn toàn có thể lập tạo nhiều màu hơn cho thiết bị, so với trường hợp của tôi, màu tím ở phía trước và màu vàng sáng ở phía sau, nhưng điểm yếu kém của nó là làm suy yếu cấu trúc, hơn là bạn sẽ phải vận dụng nhiều ốc vít hơn và củng cố cấu trúc cho nó .
Bước 7: Những điều cần xem xét khi lập mô hình (2)

Máy in 3D của tôi được thiết lập là:
Độ phân giải : 0,2 mm
Hãy tưởng tượng bạn đang in một dòng 0,2 mm, nó thường chiếm thêm 0,1 độ dày, giả sử, nếu tôi muốn có khoảng cách 0,1 mm giữa 2 lớp, bạn sẽ không có khoảng cách nào cả vì mỗi lớp chiếm thêm 0,1 mm, do đó, trong ngữ cảnh khoảng cách 0,1 mm, bạn sẽ nhận được nhiễu 0,1 mm của hai lớp ( khoảng cách 0,1 mm trừ đi độ dày thêm 0,2 mm ). Nói một cách đơn thuần, nếu bạn muốn có khoảng cách 0,1 mm, thay vào đó là 0,3 và bạn sẽ có khoảng cách 0,1 mm trong thực tiễn .
Hoàn thành tổng thể khung và vị trí, và mở màn vận dụng tính năng bù cho những phần tương tác đó .
Bước 8: Thêm chi tiết vào 3D
Vì tôi sẽ đưa dự án Bất Động Sản này vào một cuộc thi khác, tôi sẽ không tải lên tệp STL mà là hướng dẫn mọi người cách triển khai .
Tệp đính kèm là một tệp edrawing, thế cho nên bạn hoàn toàn có thể lật xung quanh và xem bên trong những cụ thể lắp ráp của tôi. Tôi cũng đính kèm một pic chỉ để cho bạn thấy bố cục tổng quan .
Tôi không sử dụng ốc vít để cố định và thắt chặt toàn bộ những bộ phận tại chỗ, mà chỉ sử dụng hai bức tường có khe hở chặt để kẹp những thành phần .
R2_ASSEMBLY.zip
Bước 9: In 3D

Cài đặt cho việc in ấn của tôi .
- Máy in: Máy sao chép Makebot 2x
- Nhiệt độ đầu đùn in: 234 độ.
- Nền tảng: 150 độ.
- Độ phân giải: 0,2mm
- Vỏ: 2 lớp.
Sử dụng màu sáng như vàng và trắng, điều tốt là, khi bạn vô hiệu tương hỗ, dấu tương hỗ sẽ ít nhìn thấy hơn, với màu tối hơn, dấu tương hỗ sẽ rõ rang hơn. Kỹ thuật này chỉ vận dụng cho mặt phẳng phải có của tương hỗ .
Tôi đã mất 3 lần in thử và lỗi để có được tổng thể những kích cỡ đúng .
Bước 10: Lắp ráp phía trong
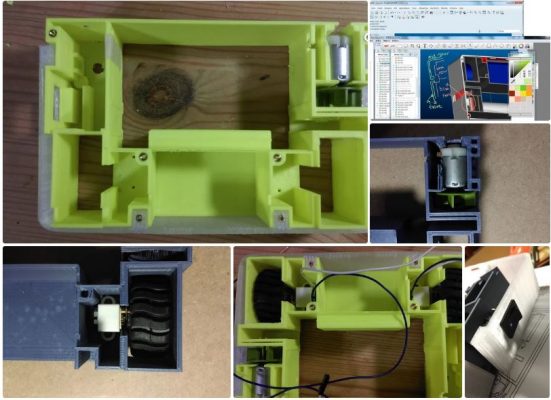
- Bắt đầu bằng cách lắp ráp khung MID-REAR thành khung MID-BOTTOM.
- Áp dụng độc lập cho khung MID-REAR và BOTTOM-REAR.
- Pic cho thấy cấu trúc của hooking, hookup khung MID-REAR và BOTTOM-REAR.
- Đấu dây cho động cơ quạt và gắn cánh quạt vào động cơ, đặt nó vào vỏ BOTTOM-REAR như hình minh họa.
- Đấu dây cho động cơ bánh xe, gắn bánh xe vào động cơ và vặn chặt mô tơ vào vỏ BOTTOM-REAR.
- Đấu dây công tắc và gắn nó vào lỗ của vỏ MID-REAR và BOTTOM-REAR.
Bước 11: Trục chính, con lăn, quét
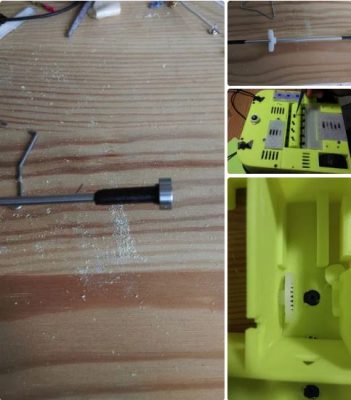
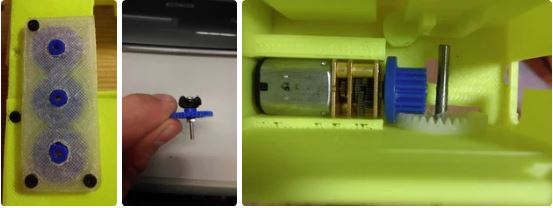
Gắn ổ đỡ vào một đầu của trục chính và thêm con lăn vào trục chính, dán bánh răng như hình cho thấy trục chính, đặt con lăn vào vỏ và mở màn gắn chổi vào con lăn bằng keo .
Tiếp theo, đặt 3 bánh răng màu xanh vào vỏ phía dưới và vặn chặt nắp bánh răng như hình cho thấy, trồng 1 số ít bàn chải vào vật màu đen gắn vào bánh răng màu xanh để trở thành người quét .
Cố gắng chuyển dời một thiết bị để xem liệu nó kích hoạt phần còn lại .
Đặt động cơ có dây với bánh răng gắn vào vỏ ,
Bước 12: Pin và lắp ráp
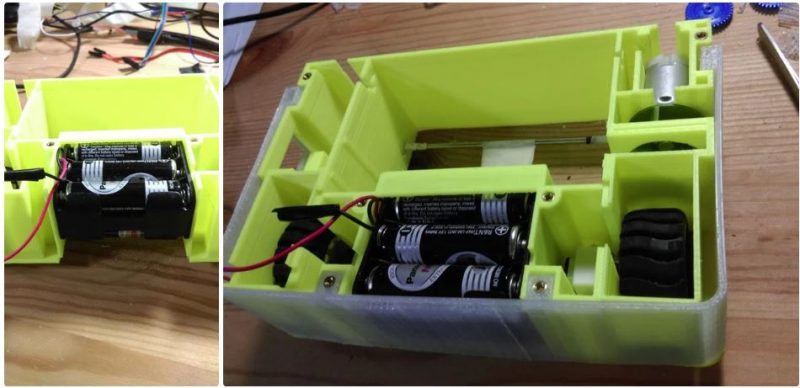
Đặt pin trong khoảng trống dành riêng cho nó. Và nửa lắp ráp REAR của bạn sẽ trông giống như cách pic hiển thị .
Bước 13: Front Assembly
Sau khi lắp ráp nửa phía sau, việc tất cả chúng ta sẽ làm là lắp ráp nửa phía trước .
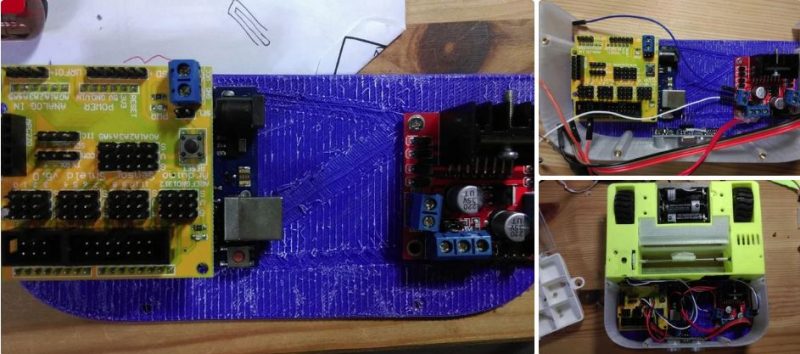
- Lấy vỏ TOP-FRONT của bạn, lật nó lên và vặn chặt các board UNO và L298 của bạn.
- Vặn chặt khungTOP-FRONT của bạn vào khung MID-FRONT.
- Trượt cụm nửa trước vào nửa lắp ráp REAR của bạn thông qua 2 khe.
- đặt cảm biến siêu âm của bạn vào vỏ MID-FRONT như các hình hiển thị.
Bước 14: Lắp ráp khung BOTTOM-FRONT.
- đặt pin vào khung pin, cho cáp qua vỏ.
- nối dây pin như pic cho thấy.
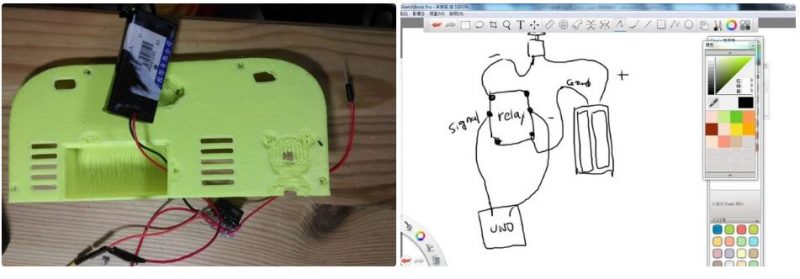
- nối dây với động cơ quạt,
- Hàn hai dây cáp vào rơle, hai dây cáp này để điều khiển rơle, vì vậy một khi uno được kích hoạt, nó sẽ cho phép dòng điện chạy qua rơle và kích hoạt động cơ quạt.
Bước 15: Cáp và code
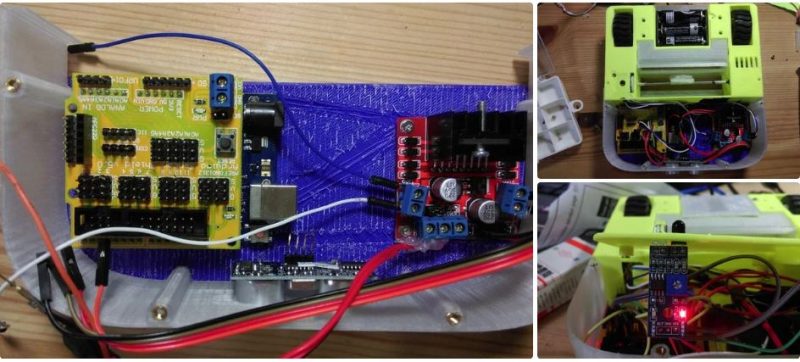
Ở quá trình này, chúng tôi sẽ triển khai xong việc nối dây trước khi vặn chặt nắp FRONT-BTM vào thân máy để triển khai xong thiết bị. Kết nối cáp cần phải được thống nhất với thiết lập mã .
int pinLB = 6 ; / / xác lập bánh xe bên trái
int pinLF = 9 ; int pinRB = 10 ; / / xác lập bánh xe bên phải
int pinRF = 11 ;
int inputPin = A0 ; / / xác lập cảm ứng vách đá bên trái
int outputPin = A1 ; / / xác lập đúng cảm ứng vách đá
Đối với động cơ của quạt và con lăn, chỉ cần liên kết với bất kể pin + và – trống nào .
Ultra_tracking2.ino
Bước 16: Giai đoạn cuối cùng

Vặn nắp FRONT = BTM vào cụm. Đối với nắp nhìn xuyên qua trên đỉnh của hộp thu bụi, hãy thử đặt một chút ít keo vào nó với bộ phận giữ thanh ( bản lề ) và đặt hàng loạt vào bộ lắp ráp. Sau khi hoàn thành xong, vặn nắp REAR-TOP vào nó để hoàn thành xong việc lắp ráp .
Tôi cũng đã thêm nắp pin vào dưới cùng của robot để giữ pin và in ra một hộp thu bụi .
Mặc dù phải mất một lượng thời hạn khổng lồ để triển khai xong dự án Bất Động Sản này, nhưng nó đáng để thực thi vì ý thức hoàn thành xong và tôi kỳ vọng bạn thích hướng dẫn này .
Source: https://evbn.org
Category : Làm Gì

















![Toni Kroos là ai? [ sự thật về tiểu sử đầy đủ Toni Kroos ]](https://evbn.org/wp-content/uploads/New-Project-6635-1671934592.jpg)


