
Ai phát minh ra Radar? Có mấy loại Radar?
Ai là người đã phát minh ra hệ thống thiết bị Radar?
Các thông tin của bài viết về radar bao gồm: Sự ra đời của thiệt bị hệ thống radar, radar có những loại nào? Tính ứng dụng và phương trình phạm vi Radar…
Mục Lục
Nguồn gốc Radar được ra đời bởi nhà phát minh nào? Hãy theo dõi toàn bộ bài viết để biết thêm về các thông tin liên quan tới hệ thống Radar nhé!
Ai đã phát minh ra Radar?
Tương tự như một số phát minh, hệ thống radar không dễ dàng cấp tín dụng cho một cá nhân vì nó là kết quả của quá trình nghiên cứu trước đó về các đặc tính của bức xạ điện từ đối với khả năng tiếp cận của nhiều thiết bị điện tử. Vấn đề quan tâm chính là phức tạp hơn bởi sự che giấu của quyền riêng tư quân sự mà theo đó các kỹ thuật định vị vô tuyến đã được kiểm tra ở các quốc gia khác nhau trong những ngày đầu của Thế chiến thứ hai.
Người viết bài đánh giá này cuối cùng đã kết luận rằng khi hệ thống radar là một trường hợp rõ ràng là tạo ra trực tiếp, ghi chú của Robert Watson-Watt về Phát hiện & Vị trí Máy bay bằng Phương pháp Vô tuyến được xuất bản ngay cách đây 50 năm. Vì vậy, nó là ấn phẩm đơn độc quan trọng nhất trong lĩnh vực này. Thành tựu của Anh trong cuộc chiến của Anh đã phân bổ phần lớn vào việc mở rộng hệ thống radar bao gồm tăng trưởng kỹ thuật với tính khả thi trong hoạt động.

Hệ thống Radar là gì?
RADAR là viết tắt của Radio Detection and Ranging System. Về cơ bản, đó là hệ thống điện từ, nó được sử dụng để phát hiện ra vị trí và khoảng cách của vật thể nào đó từ điểm đặt của RADAR. Nó hoạt động bằng cách bức xạ năng lượng vào không gian và theo dõi tín hiệu dội lại hoặc phản xạ từ các vật thể. Nó hoạt động trong phạm vi UHF và vi sóng.
Radar là một cảm biến điện từ, được sử dụng để thông báo, theo dõi, định vị và xác định các vật thể khác nhau ở những khoảng cách nhất định. Hoạt động của radar là truyền năng lượng điện từ theo hướng của các mục tiêu để quan sát tiếng vọng và phản hồi từ chúng. Ở đây mục tiêu không có gì khác ngoài tàu, máy bay, thiên thể, phương tiện ô tô, tàu vũ trụ, mưa, chim, côn trùng, v.v. Thay vì chú ý đến vị trí và vận tốc của mục tiêu, đôi khi nó cũng có được hình dạng và kích thước của chúng.
Mục tiêu chính của radar so với các thiết bị cảm biến hồng ngoại và quang học là phát hiện các mục tiêu ở xa trong điều kiện khí hậu khó khăn và xác định khoảng cách, phạm vi, thông qua độ chính xác. Radar có máy phát riêng được biết đến như một nguồn chiếu sáng để đặt mục tiêu. Nói chung, nó hoạt động trong vùng vi ba của phổ điện từ được tính bằng hertz khi tần số mở rộng từ 400 MHz đến 40 GHz. Các thành phần thiết yếu được sử dụng trong radar.

Radar trải qua quá trình phát triển nhanh chóng trong những năm 1930-40 để đáp ứng các yêu cầu của quân đội. Nó vẫn được sử dụng rộng rãi thông qua các lực lượng vũ trang, bất cứ nơi nào một số tiến bộ công nghệ đã tạo ra. Đồng thời, radar cũng được sử dụng trong các ứng dụng dân sự, đặc biệt là kiểm soát không lưu, quan sát thời tiết, điều hướng tàu thuyền, môi trường, cảm biến từ xa, quan sát hành tinh, đo tốc độ trong các ứng dụng công nghiệp, giám sát không gian, thực thi pháp luật, v.v.
Các loại Radar
Có nhiều loại radar khác nhau bao gồm những loại sau.
Radar tĩnh điện
Loại hệ thống radar này bao gồm một bộ phát Tx & một bộ thu Rx- được phân chia thông qua một khoảng cách tương đương với khoảng cách của đối tượng ước tính. Máy phát và máy thu được đặt ở một vị trí tương tự được gọi là radar tu viện trong khi phần cứng quân sự trên không và không đối không tầm xa sử dụng radar sinh học.
Doppler Radar
Đây là một loại radar đặc biệt sử dụng Hiệu ứng Doppler để tạo ra dữ liệu vận tốc liên quan đến mục tiêu ở một khoảng cách cụ thể. Điều này có thể thu được bằng cách truyền tín hiệu điện từ theo hướng của một đối tượng để nó phân tích hành động của đối tượng đã ảnh hưởng như thế nào đến tần số của tín hiệu trả về.
Sự thay đổi này sẽ cung cấp các phép đo rất chính xác cho thành phần xuyên tâm của vận tốc của một vật thể trong mối quan hệ với radar. Các ứng dụng của các radar này liên quan đến các ngành khác nhau như khí tượng, hàng không, chăm sóc sức khỏe, v.v.

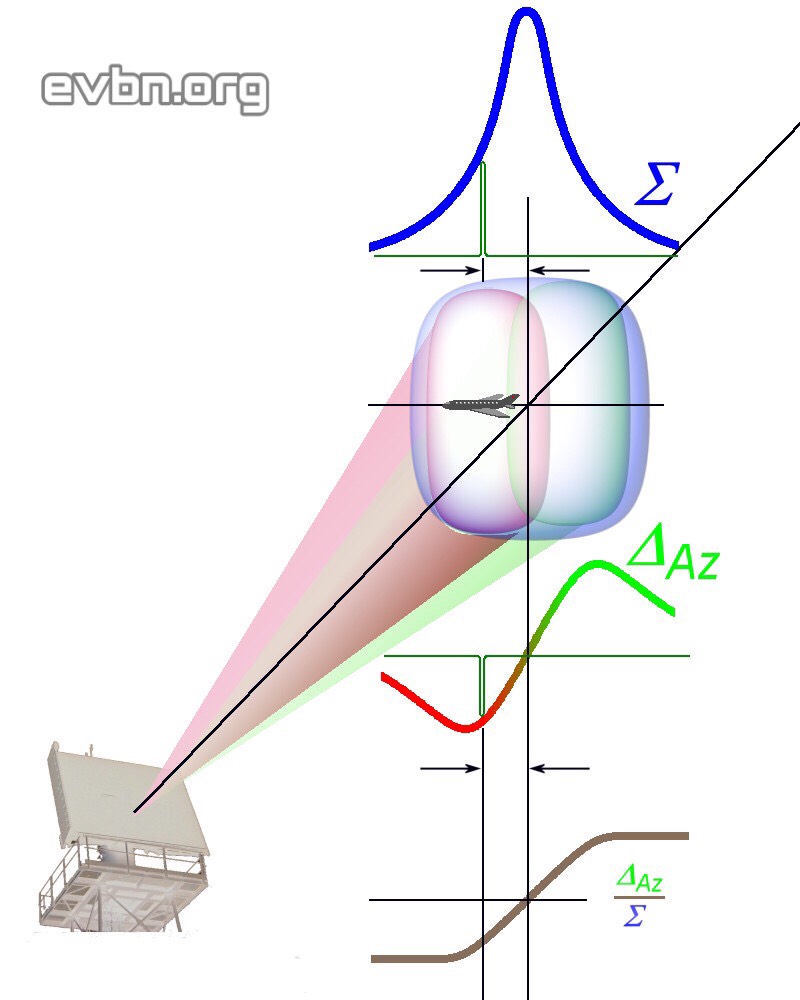
Radar monopulse
Loại hệ thống radar này so sánh tín hiệu thu được bằng cách sử dụng một xung radar cụ thể bên cạnh nó bằng cách đối chiếu tín hiệu được quan sát theo nhiều hướng khác nhau là các phân cực. Loại radar monopulse thường dùng nhất là radar quét hình nón. Loại radar này đánh giá sự trở lại từ hai cách để đo trực tiếp vị trí của đối tượng. Điều quan trọng cần lưu ý là các radar được phát triển vào năm 1960 là radar monopulse.
Radar thụ động
Loại radar này được thiết kế chủ yếu để nhận biết cũng như theo dõi các mục tiêu thông qua việc xử lý các chỉ thị từ ánh sáng trong môi trường xung quanh. Các nguồn này bao gồm các tín hiệu giao tiếp cũng như các chương trình phát sóng thương mại. Việc phân loại radar này có thể được thực hiện trong cùng loại radar sinh học.
Radar thiết bị đo
Các radar này được thiết kế để thử nghiệm máy bay, tên lửa, tên lửa, v.v. Chúng cung cấp các thông tin khác nhau bao gồm không gian, vị trí và thời gian cả trong phân tích xử lý hậu kỳ và thời gian thực.
Radar thời tiết

Chúng được sử dụng để phát hiện hướng và thời tiết bằng cách sử dụng tín hiệu vô tuyến thông qua phân cực tròn hoặc ngang. Sự lựa chọn tần số của radar thời tiết chủ yếu phụ thuộc vào sự thỏa hiệp hiệu suất giữa độ suy giảm cũng như khả năng phản xạ lượng mưa do kết quả của hơi nước trong khí quyển. Một số loại radar chủ yếu được thiết kế để sử dụng dịch chuyển Doppler để tính toán tốc độ gió cũng như phân cực kép để nhận ra các loại mưa.
Lập bản đồ Radar
Các radar này chủ yếu được sử dụng để khảo sát một khu vực địa lý rộng lớn cho các ứng dụng của viễn thám & địa lý. Là kết quả của radar khẩu độ tổng hợp, chúng bị hạn chế đối với các mục tiêu đứng yên. Có một số hệ thống radar đặc biệt được sử dụng để phát hiện con người sau các bức tường khác biệt hơn so với hệ thống được tìm thấy trong vật liệu xây dựng.
Radar điều hướng
Nói chung, chúng giống nhau để tìm kiếm rađa, nhưng chúng có bước sóng nhỏ có khả năng tái tạo từ mặt đất & từ đá. Chúng thường được sử dụng trên tàu thương mại cũng như máy bay đường dài. Có nhiều loại radar điều hướng khác nhau như radar hàng hải được đặt phổ biến trên tàu để tránh va chạm cũng như mục đích điều hướng.
Radar xung
Pulsed RADAR gửi xung công suất cao và tần số cao về phía đối tượng mục tiêu. Sau đó, nó đợi tín hiệu dội lại từ đối tượng trước khi một xung khác được gửi đi. Phạm vi và độ phân giải của RADAR phụ thuộc vào tần số lặp lại xung. Nó sử dụng phương pháp dịch chuyển Doppler.
Nguyên tắc của RADAR phát hiện các đối tượng chuyển động bằng cách sử dụng dịch chuyển Doppler hoạt động dựa trên thực tế là các tín hiệu tiếng vọng từ các đối tượng đứng yên ở cùng một pha và do đó bị hủy bỏ trong khi tín hiệu tiếng vọng từ các đối tượng chuyển động sẽ có một số thay đổi trong pha. Các radar này được phân thành hai loại.
Pulse-Doppler
Nó truyền tần số lặp lại xung cao để tránh sự mơ hồ Doppler. Tín hiệu đã truyền và tín hiệu dội lại nhận được trộn lẫn trong một bộ dò để có được sự dịch chuyển Doppler và tín hiệu chênh lệch được lọc bằng bộ lọc Doppler nơi các tín hiệu nhiễu không mong muốn bị loại bỏ.
Chỉ báo Mục tiêu Di chuyển
Nó truyền tần số lặp lại xung thấp để tránh sự mơ hồ về phạm vi. Trong hệ thống MTI RADAR, các tín hiệu dội lại nhận được từ đối tượng được hướng tới bộ trộn, nơi chúng được trộn với tín hiệu từ bộ dao động cục bộ ổn định (STALO) để tạo ra tín hiệu IF.
Tín hiệu IF này được khuếch đại và sau đó được đưa đến bộ tách pha nơi pha của nó được so sánh với pha của tín hiệu từ Bộ dao động kết hợp (COHO) và tín hiệu chênh lệch được tạo ra. Tín hiệu kết hợp có cùng pha với tín hiệu phát. Tín hiệu kết hợp và tín hiệu STALO được trộn và đưa đến bộ khuếch đại công suất được bật và tắt bằng cách sử dụng bộ điều chế xung.
Sóng liên tục
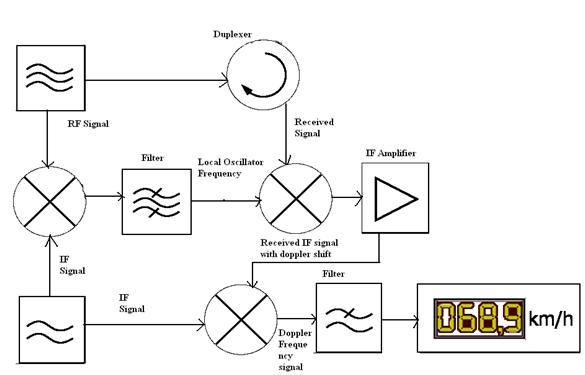
RADAR sóng liên tục không đo phạm vi của mục tiêu mà là tốc độ thay đổi phạm vi bằng cách đo sự dịch chuyển Doppler của tín hiệu trở lại. Trong một CW RADAR bức xạ điện từ được phát ra thay vì xung. Về cơ bản, nó được sử dụng để đo tóc độ.
Tín hiệu RF và tín hiệu IF được trộn trong giai đoạn trộn để tạo ra tần số dao động cục bộ. Tín hiệu RF sau đó là tín hiệu truyền đi và tín hiệu nhận được bởi ăng ten RADAR bao gồm tần số RF cộng với tần số dịch chuyển Doppler. Tín hiệu nhận được được trộn với tần số dao động cục bộ trong giai đoạn hỗn hợp thứ hai để tạo ra tín hiệu tần số IF.
Tín hiệu này được khuếch đại và đưa đến giai đoạn hỗn hợp thứ ba, nơi nó được trộn với tín hiệu IF để thu được tín hiệu có tần số Doppler. Tần số Doppler hoặc dịch chuyển Doppler này cho tốc độ thay đổi phạm vi của mục tiêu và do đó vận tốc của mục tiêu được đo.
Phương trình phạm vi radar
Có nhiều loại phiên bản khác nhau cho các phương trình phạm vi của radar. Ở đây, phương trình sau đây là một trong những dạng cơ bản cho một hệ thống ăng-ten duy nhất. Khi đối tượng được giả định là ở giữa tín hiệu ăng-ten, thì phạm vi phát hiện radar cao nhất có thể được viết là:
Rmax = 4√Pt λ2G2σ / (4π) 3Pmin
= 4√Pt C2G2σ / fo2 (4π) 3Pmin
‘Pt’ = Truyền công suất
‘Pmin’ = Tín hiệu có thể phát hiện tối thiểu
‘λ’ = Bước sóng truyền
‘σ’ = Mặt cắt ngang của radar mục tiêu
‘fo’ = Tần số tính bằng Hz
‘G’ = Độ lợi của ăng-ten
‘C’ = Tốc độ ánh sáng
Trong phương trình trên, các biến ổn định cũng như dựa vào radar ngoài mục tiêu như RCS. Thứ tự công suất phát sẽ là 1 mW (0 dBm) và độ lợi của ăng-ten xấp xỉ 100 (20 dB) đối với ERP (công suất bức xạ hiệu quả) là 20 dBm (100 mW). Thứ tự của các tín hiệu ít được chú ý nhất là picowat và RCS cho một chiếc xe có thể là 100 mét vuông.
Vì vậy, độ chính xác của phương trình phạm vi radar sẽ là dữ liệu đầu vào. Pmin (tín hiệu tối thiểu đáng chú ý) chủ yếu phụ thuộc vào băng thông của máy thu (B), F (hình tiếng ồn), T (nhiệt độ) & tỷ lệ S / N cần thiết (tỷ lệ tín hiệu trên nhiễu).
Máy thu có băng thông hẹp sẽ phản hồi nhanh hơn so với máy thu BW rộng. Con số tiếng ồn có thể được định nghĩa là; nó là một phép tính về mức độ nhiễu mà máy thu có thể đóng góp vào một tín hiệu. Khi con số tiếng ồn nhỏ hơn thì thiết bị sẽ ít tiếng ồn hơn. Khi nhiệt độ tăng sẽ ảnh hưởng đến độ nhạy của máy thu thông qua nhiễu đầu vào tăng lên.
Pmin = k TBF (S / N) phút
Từ phương trình trên,
‘Pmin’ là tín hiệu ít phát hiện nhất
‘k’ là hằng số Boltzmann như 1,38 x 10-23 (Watt * giây / ° Kelvin)
‘T’ là nhiệt độ (° Kelvin)
‘B’ là băng thông của máy thu (Hz)
‘F’ là Hình tiếng ồn (dB), Hệ số tiếng ồn (tỷ lệ)
(S / N) min = Tỷ lệ S / N ít nhất
Công suất nhiễu nhiệt i / p sẵn có có thể tỷ lệ thuận với kTB ở bất cứ nơi nào ‘k’ là hằng số Boltzmann, ‘T’ là nhiệt độ và ‘B’ là băng thông của nhiễu máy thu tính bằng hertz.
T = 62,33 ° F hoặc 290 ° K
B = 1 Hz
kTB = -174 dBm / Hz
Phương trình phạm vi radar ở trên có thể được viết cho công suất nhận được như một phạm vi chức năng cho công suất phát, độ lợi ăng ten, RCS & bước sóng được cung cấp.
Prec = Pt λ2G2σ / (4π) 3R4max = Pt C2G2σ / (4π) 3R4fo2
Prec = PtG2 (λ / 4π) 2 σ / 4πR2
Từ phương trình trên,
‘Prec’ là công suất nhận được
‘Pt’ là công suất phát
‘fo’ là tần số phát
‘λ’ là bước sóng truyền
‘G’ là độ lợi của một ăng-ten
‘σ’ là mặt cắt của radar
‘R’ là phạm vi
‘c’ là tốc độ ánh sáng
Các ứng dụng
Ứng dụng quân sự

Nó có 3 ứng dụng chính trong Quân sự:
- Trong phòng không, nó được sử dụng để phát hiện mục tiêu, nhận dạng mục tiêu và điều khiển vũ khí (hướng vũ khí đến các mục tiêu được theo dõi).
- Trong một hệ thống tên lửa để dẫn đường cho vũ khí.
- Xác định vị trí của kẻ thù trên bản đồ.
Kiểm soát không lưu
Nó có 3 ứng dụng chính trong kiểm soát Không lưu:
- Để kiểm soát không lưu gần các sân bay. Hệ thống giám sát hàng không RADAR được sử dụng để phát hiện và hiển thị vị trí của máy bay trong nhà ga sân bay.
- Để hướng dẫn máy bay hạ cánh trong điều kiện thời tiết xấu bằng Phương pháp Tiếp cận Chính xác RADAR.
- Để quét bề mặt sân bay để tìm vị trí máy bay và phương tiện mặt đất
Viễn thám
Nó có thể được sử dụng để quan sát hoặc quan sát vị trí hành tinh và theo dõi băng biển để đảm bảo tuyến đường thông suốt cho tàu.
Kiểm soát giao thông mặt đất
Nó cũng có thể được cảnh sát giao thông sử dụng để xác định tốc độ của xe, kiểm soát chuyển động của xe bằng cách đưa ra cảnh báo về sự có mặt của các phương tiện khác hoặc bất kỳ chướng ngại vật nào khác phía sau.
Không gian
- Hướng dẫn phương tiện vũ trụ hạ cánh an toàn trên mặt trăng
- Để quan sát các hệ hành tinh
- Để phát hiện và theo dõi vệ tinh
- Để theo dõi các thiên thạch

















![Toni Kroos là ai? [ sự thật về tiểu sử đầy đủ Toni Kroos ]](https://evbn.org/wp-content/uploads/New-Project-6635-1671934592.jpg)


